
Caminho de Glide com Instrumento de Busca de Trajeto Acionado por Reciprocidade: Desempenho e Taxa de Fratura
Tradução automática
O artigo original está escrito em EN language (link para lê-lo) .
Resumo
Introdução: Este estudo avaliou o número de canais mesiais e distais de molares mandibulares nos quais o instrumento reciprocante R-Pilot atingiu o comprimento de trabalho (WL) durante o procedimento de macro glide path. As taxas de fratura e deformação também foram avaliadas. Métodos: Cento e cinquenta e seis canais radiculares de 52 dentes foram explorados até o comprimento do forame apical. Em seguida, o instrumento R-Pilot foi posicionado na orifício do canal e ativado. O instrumento foi movido utilizando um movimento de picote e leve pressão apical. Este procedimento foi repetido na tentativa de alcançar o WL. O tipo de fratura e/ou deformação do instrumento foi avaliado por meio de microscopia eletrônica de varredura, enquanto as raízes com instrumentos fraturados foram escaneadas por tomografia computadorizada de micro. A distribuição percentual de frequência de fraturas, deformações e canais radiculares nos quais o R-Pilot atingiu o WL foi registrada e comparada estatisticamente utilizando o teste χ2 de Pearson com α = 5%. Resultados: Os instrumentos R-Pilot atingiram o WL em 139 canais radiculares (89,10%), e o teste χ2 mostrou uma diferença significativa entre as frequências observadas e as frequências esperadas (χ2 = 95,41, P = .000). As frequências observadas de fraturas (2,56%) e deformações (1,92%) também foram significativamente menores do que as esperadas (fratura: χ2 = 140,41, P = .000; deformação: χ2 = 144,23, P = .000). As fraturas ocorreram principalmente nas partes apicais e curvas dos canais radiculares. Conclusões: O R-Pilot atingiu o WL em 89,10% dos canais radiculares de molares mandibulares com taxas de fratura e deformação de 2,56% e 1,92%, respectivamente. (J Endod 2020;■:1–5.)
O caminho de deslizamento foi definido como um procedimento clínico para expandir ou criar um túnel suave da porção coronal do canal radicular até seu término fisiológico antes de seu alargamento final, visando controlar o estresse torsional e reduzir as chances de fratura dos instrumentos de níquel-titânio (NiTi). Os passos essenciais que precedem o caminho de deslizamento foram chamados de “micro caminho de deslizamento” e compreendem tanto a exploração do canal quanto a patência apical (ou seja, a localização da saída do forame principal); eles são geralmente realizados com pequenas limas manuais de aço inoxidável pré-curvadas e movimentos suaves de relógio. No entanto, esses procedimentos preliminares podem ser desafiadores e demorados nas clínicas, especialmente ao lidar com canais radiculares curvados e/ou calcificados. Após o micro caminho de deslizamento ter sido realizado com sucesso, o canal já explorado ainda precisa ser ampliado, um procedimento chamado de “macro caminho de deslizamento”. Isso é realizado usando limas manuais ou instrumentos de NiTi mecanicamente acionados especialmente projetados; estes últimos são preferidos uma vez que têm sido associados à redução da dor pós-operatória e crises, bem como à melhor manutenção da anatomia original do canal. Por outro lado, como o canal ainda é estreito, o uso de instrumentos rotativos de NiTi com pequenas dimensões, os chamados localizadores, tem sido relatado como mais suscetível a fraturas e imprevisível em termos de eficácia e segurança clínica. Com o objetivo de superar essas desvantagens, várias abordagens foram propostas, incluindo mudanças em sua liga de NiTi, design e, mais recentemente, a cinemática do movimento.
A movimentação reciprocante trouxe novas perspectivas para a preparação mecanicamente ativada, pois reduz o tempo de trabalho, a fadiga cíclica e o estresse torsional dos instrumentos quando comparado à rotação contínua. Recentemente, o instrumento R-Pilot (VDW GmbH, Munique, Alemanha) foi lançado para a preparação de caminho de deslizamento macro em movimento reciprocante. O R-Pilot é feito de liga NiTi M-Wire com 0,04 de afunilamento, seção transversal em forma de S e uma ponta não cortante com diâmetro de 0,125 mm. Embora suas propriedades mecânicas tenham sido avaliadas em estudos anteriores, seu desempenho para alcançar o comprimento de trabalho (WL) ainda é desconhecido. Portanto, o presente estudo teve como objetivo avaliar as taxas de fratura e deformação, bem como o número de canais radiculares nos quais o instrumento R-Pilot foi capaz de alcançar o WL dos canais mesiais e distais dos molares mandibulares durante o procedimento de caminho de deslizamento macro.
As hipóteses de trabalho deste estudo eram que os instrumentos R-Pilot alcançam o WL em uma alta frequência de casos e têm baixas taxas de fratura/deformação.
Materiais e métodos
Estimativa do Tamanho da Amostra
Com base em um estudo com design experimental semelhante, o tamanho do efeito para o uso do movimento reciprocante para alcançar o WL foi determinado como 0,296. Portanto, utilizando a família χ2 e o teste de adequação (G*Power 3.1 para Macintosh; Heinrich Heine, Universität Düsseldorf, Düsseldorf, Alemanha) com parâmetros adicionais de erro tipo alfa de 0,05 e potência beta de 0,95, um tamanho mínimo de amostra de 149 canais radiculares foi indicado.
Seleção de Especimens
Após a aprovação deste projeto pelo Comitê de Ética local (protocolo nº 2.985.618), um total de 100 primeiros e segundos molares mandibulares, extraídos por razões não relacionadas a este estudo, foram selecionados aleatoriamente de um conjunto de dentes, radiografados nas direções mesial e distal utilizando um sensor digital (sistema radiográfico digital Schick CDR; Dentsply Sirona, Charlotte, NC), e armazenados em solução de timol a 0,5% a 5◦C. Dentes com ápice aberto, reabsorções ou fraturas radiculares foram excluídos. Os critérios de inclusão consistiram em molares mandibulares com raízes moderadamente curvadas (10◦– 20◦), 2 canais radiculares mesiais independentes, desde o nível do orifício até o término apical, e 1 ou 2 canais independentes na raiz distal. Posteriormente, 52 molares mandibulares com 156 canais radiculares foram selecionados.
Preparação do Caminho de Glide
Após a preparação convencional de acesso, cada dente foi montado em um aparelho específico (IM Brazil, São Paulo, SP, Brasil) que simula o alvéolo e permite a conexão do clipe de lábio metálico de um localizador apical eletrônico (EAL), de acordo com um estudo anterior. Conforme recomendado pelo fabricante, antes do uso do instrumento R-Pilot, foi realizada a exploração do canal radicular (micro caminho de glide) com uma lima manual de 25 mm tamanho .08 (C-Pilot; VDW GmbH) conectada a um EAL (Root ZX; J Morita USA Inc, Irvine, CA) aplicando pressão leve a moderada e movimentos de rotação cuidadosos ao longo do canal radicular até que a tela do EAL exibisse a marca de leitura “0.0”. O WL foi definido como este ponto de referência.
Antes do procedimento de macro caminho de glide, todos os instrumentos R-Pilot selecionados foram inspecionados através de um microscópio operatório com ampliação de X16 para excluir instrumentos com defeitos críticos ou distorções, e nenhum foi excluído. O instrumento R-Pilot foi então montado em uma peça de mão de ângulo contra (Sirona, Bensheim, Alemanha) alimentada por um motor elétrico (VDW Gold; VDW GmbH), e o suporte da lima do EAL foi preso à parte não ativa da lâmina. Após isso, o R-Pilot foi posicionado no nível do orifício com o mesmo ângulo de inserção da lima de exploração até que a resistência fosse sentida e ativada em movimento reciprocante (“modo RECIPROC ALL”). O instrumento foi movido na direção apical usando 3 movimentos de batida para dentro e para fora de cerca de 3 mm de amplitude com uma leve pressão apical, após o qual foi removido do canal, limpo com gaze umedecida com álcool e inspecionado quanto a fraturas ou deformações. O canal radicular foi então irrigado com 2 mL de hipoclorito de sódio a 2,5%. Este procedimento foi repetido 3 vezes na tentativa de alcançar o WL. Após isso, se o instrumento não alcançasse o WL, esse procedimento foi interrompido.
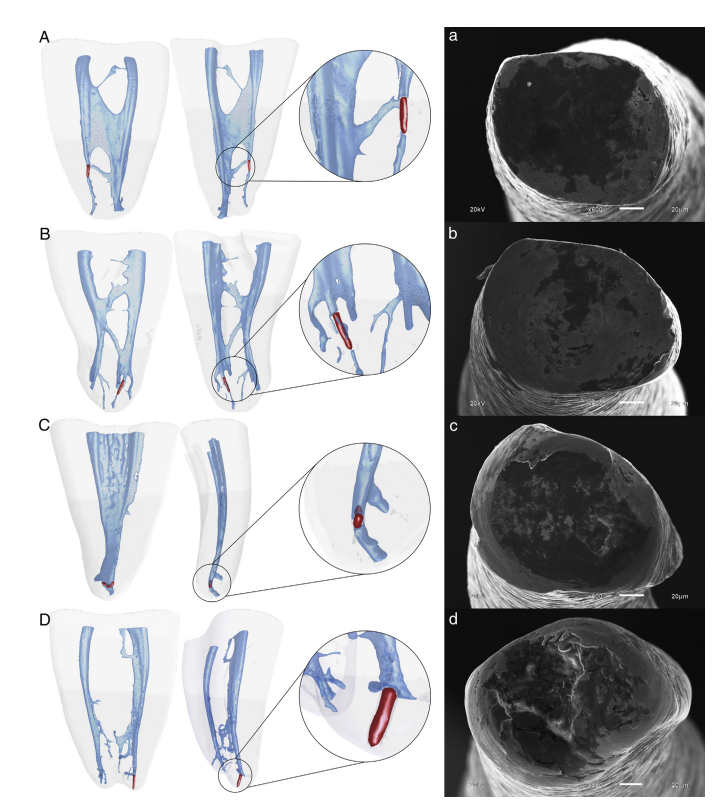
Os números de fraturas, deformações e canais radiculares nos quais o instrumento R-Pilot alcançou o WL foram registrados. O tipo de fratura e/ou deformação foi determinado em ampliações de X200 a X2000 através de um microscópio eletrônico de varredura (SEM) (JEOL JSM 6510 LV; JEOL, Tóquio, Japão) após os instrumentos serem limpos ultrassonicamente. Além disso, raízes com um instrumento fraturado foram escaneadas em um dispositivo de microtomografia computadorizada (micro-CT) (SkyScan 1173; Bruker microCT, Kontich, Bélgica) operado a 80 kV e 100 mA, com uma resolução isotrópica de 12,82 mm, rotação de 360◦ ao redor do eixo vertical e passo de rotação de 0,4◦ para verificar as possíveis razões para a fratura (Fig. 1). Um especialista em endodontia com 5 anos de experiência clínica realizou todos os procedimentos, e cada instrumento foi utilizado em apenas 1 dente e descartado.
Análise Estatística
As distribuições de frequência percentual (%) de espécimes nos quais o instrumento R-Pilot alcançou e não alcançou o WL foram registradas e comparadas estatisticamente utilizando o teste χ2 de Pearson. O erro do tipo alfa e o χ2 crítico foram definidos em 0,05 e 3,84, respectivamente, conforme indicado pelo cálculo do poder da amostra.
Resultados
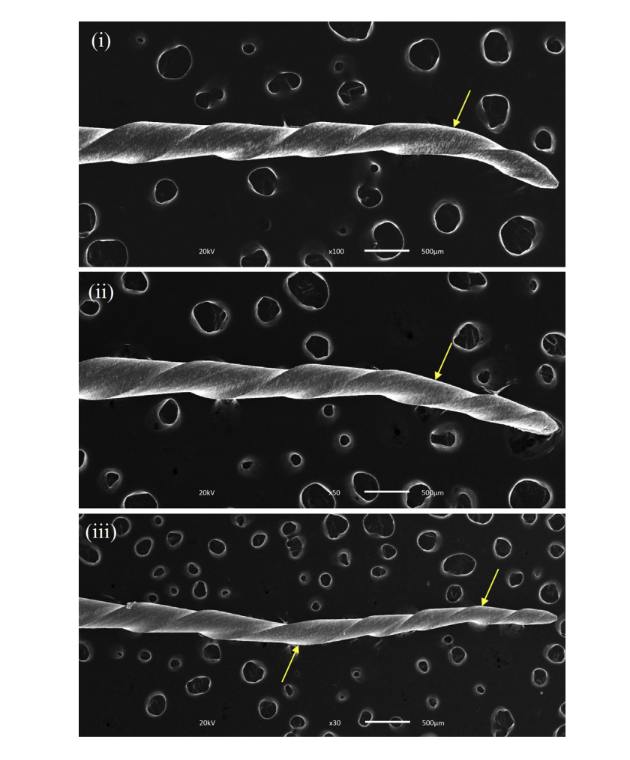
No geral, os instrumentos R-Pilot alcançaram a WL em 139 canais radiculares (89,10%). O teste c2 mostrou que as frequências observadas nas quais o R-Pilot alcançou a WL eram significativamente diferentes das frequências esperadas (χ2 = 95,41, P = .000). Durante o experimento, fratura foi observada em 4 instrumentos (2,56%) e classificada como mista (n = 3) e torsional (n = 1) (Fig. 1), enquanto 3 instrumentos (1,92%) mostraram deformação da lâmina (Fig. 2). A análise do qui-quadrado demonstrou que as frequências observadas de fratura e deformação também eram significativamente menores do que as esperadas (fratura: χ2 = 140,41, P = .000; deformação: χ2 = 144,23, P = .000). Figura 1 mostra modelos tridimensionais (3D) adquiridos por meio de tomografia computadorizada micro-CT das 4 raízes, retratando os instrumentos fraturados localizados principalmente na parte apical da raiz, com tamanhos variando de 0,67 a 0,85 mm.
Discussão
Os instrumentos R-Pilot alcançaram o WL em 139 de 156 canais radiculares mesiais e distais (89,10%) de molares mandibulares, com uma baixa frequência percentual de fratura e deformação. Assim, as hipóteses de trabalho deste estudo foram confirmadas. Os resultados presentes são bastante interessantes, particularmente quando comparados com a capacidade dos instrumentos de busca acionados por rotação de alcançar o forame apical (38,30%–68,30%). As descobertas atuais podem ser explicadas por 3 razões principais:
- a cinemática recíproca assimétrica que mantém a progressão apical do instrumento enquanto reduz o estresse torsional,
- o design do instrumento, com um diâmetro de ponta pequeno (0,125 mm) e um afunilamento constante (0,04 mm), que minimiza seu contato com as paredes dentinais, e
- a seção transversal em forma de S, que proporciona uma eficiência de corte eficaz.
Durante a preparação do caminho de deslizamento, o instrumento de busca de caminho está exposto a um estresse mecânico e pode se fracturar por fadiga torsional ou cíclica. Como os instrumentos de busca de caminho são mais flexíveis devido às suas menores dimensões, a fadiga cíclica parece ser menos relevante do que o estresse torsional como causa da fratura do instrumento. No presente estudo, foram observadas taxas de fratura (2,56%) e deformação (1,92%) muito baixas, e a abordagem de imagem correlativa utilizada permitiu uma compreensão qualitativa das razões para a falha do instrumento. Os instrumentos fraturados foram avaliados sob análise de MEV, e as 4 raízes com fragmentos de R-Pilot foram escaneadas em um dispositivo de micro-CT. A análise de MEV demonstrou tipos de fratura mista em 3 instrumentos e falha torsional em outro instrumento (Fig. 1), enquanto a análise dos modelos 3D mostrou que 2 das raízes tinham canais radiculares relativamente retos, mas estreitos, e a fratura ocorreu nos terços médio (n = 1) e apical (n = 1), enquanto os outros instrumentos fraturaram na curvatura do canal apical (Fig. 1). Pode-se supor que a incidência de um único tipo de fratura torsional seria consequência do movimento recíproco, que evitou eficientemente o fenômeno de bloqueio do afunilamento que frequentemente ocorre sob rotação contínua. Por outro lado, as fraturas mistas estavam possivelmente relacionadas ao operador. Avançar esse tipo de instrumento em direção ao ápice é um tanto difícil, e não é incomum que um operador aumente a pressão sobre ele, causando sua curvatura devido ao seu baixo afunilamento e pequeno núcleo. Juntas, a flexão aumentada, o bloqueio da ponta e a curvatura apical foram possivelmente a causa das fraturas mistas.
Vários estudos mostraram a eficácia dos EALs, demonstrando que o método eletrônico é a melhor maneira de determinar a WL corretamente. Além disso, o Root ZX é geralmente considerado o padrão ouro de EAL. A leitura de 0.0 do EAL é relevante porque mostra a determinação do forame apical maior. Assim, neste estudo, a marca de leitura 0.0 do Root ZX foi usada como ponto de referência para avaliar o desempenho do instrumento R-Pilot.
Em estudos comparativos, é extremamente importante padronizar a amostra para evitar viés relacionado à morfologia do canal radicular. No entanto, a presente investigação não foi um estudo comparativo. Portanto, canais radiculares com curvatura moderada foram selecionados considerando sua alta incidência em molares mandibulares e porque representam um desafio clínico para realizar procedimentos de caminho de deslizamento. Todos os canais radiculares eram aparentemente negociáveis, pois a exploração foi realizada com sucesso com um arquivo manual .08. Isso significa que nenhum desafio anatômico significativo poderia ser considerado a principal causa dos instrumentos R-Pilot que não alcançaram a WL. É possível que detritos dentinários criados durante o manejo do caminho de deslizamento tenham sido compactados no canal apical, impedindo que os instrumentos alcançassem o forame, o que apenas enfatiza a importância da irrigação do canal radicular; no entanto, isso ainda precisa ser comprovado em estudos futuros.
A avaliação da frequência percentual com que os instrumentos de navegação alcançaram o WL sem quebra ou distorção parece ser o melhor método para classificar seu desempenho e segurança. Nesse sentido, a metodologia aplicada a este estudo se encaixa muito bem nesse propósito. Também é importante destacar que, no estudo da frequência de um determinado evento em uma população, um grupo de controle não é necessariamente requerido. Por exemplo, no presente estudo, um procedimento estatístico χ2 certifica adequadamente a significância das frequências observadas. Assim, a natureza do presente estudo não foi comparativa, e nenhum grupo de referência foi necessário porque o principal objetivo foi limitado a observar o desempenho dos instrumentos R-Pilot, o primeiro navegador reciprocante lançado no mercado. Este ponto pode ser considerado uma limitação deste estudo, mas o grande tamanho da amostra necessário para obter um perfil de desempenho confiável de um determinado instrumento pode ser levado em consideração. Portanto, mais estudos utilizando o método proposto são necessários para avaliar o desempenho de novos instrumentos de navegação acionados reciprocamente.
Conclusões
Nas condições do presente estudo, pode-se concluir que os instrumentos R-Pilot alcançaram a WL em 89,10% dos canais mesiais e distais previamente explorados de molares mandibulares, com taxas de fratura e deformação de 2,56% e 1,92%, respectivamente.
Autores: Gustavo De-Deus, Milla Lessa Cardoso, Marco Simões-Carvalho, Emmanuel J. N. L. Silva, Felipe Gonçalves Belladonna, Daniele Moreira Cavalcante, Diogo da Silva Oliveira, Erick Miranda Souza, Ricardo Tadeu Lopes, Marco Aurélio Versiani
Referências:
- West JD. O Glidepath endodôntico: “segredo para a segurança rotatória”. Dent Today 2010;29:90–3.
- Ruddle CJ, Machtou P, West D. Preparação de canal endodôntico: novas inovações na gestão do glide path e moldagem de canais. Dent Today 2014;33:1–7.
- Van der Vyver PJ. Criando um glide path para instrumentos rotatórios de NiTi: parte um. Int Dent J 2010;13:6–10.
- Van der Vyver PJ. ProGlider™: protocolo clínico. Endod Practice 2014;7:42–7.
- Jonker CH, Van der Vyver PJ, De Wet FA. A influência da preparação do glide path na taxa de falha dos instrumentos reciprocantes WaveOne. SADJ 2014;69:266–9.
- Berutti E, Negro AR, Lendini M, Pasqualini D. Influência da pré-flaring manual e torque na taxa de falha dos instrumentos rotatórios ProTaper. J Endod 2004;30:228–30.
- Patiño PV, Biedma BM, Li´ebana CR, et al. A influência de um glide path manual na taxa de separação dos instrumentos rotatórios de NiTi. J Endod 2005;31:114–6.
- Pasqualini D, Bianchi CC, Paolino DS, et al. Avaliação micro-tomográfica computacional do glide path com PathFile de níquel-titânio em canais curvados de molares maxilares. J Endod 2012;38:389–93.
- Berutti E, Cantatore G, Castellucci A, et al. Uso do PathFile de níquel-titânio rotatório para criar o glide path: comparação com pré-flaring manual em canais radiculares simulados. J Endod 2009;35:408–12.
- De-Deus G, Belladonna FG, Souza EM, et al. Capacidade de exploração de 4 instrumentos de busca em canais de molares moderadamente curvados. J Endod 2016;42:1540–4.
- Pasqualini D, Mollo L, Scotti N, et al. Dor pós-operatória após glide path manual e mecânico: um ensaio clínico randomizado. J Endod 2012;38:32–6.
- Elnaghy AM, Elsaka SE. Avaliação do transporte do canal radicular, razão de centralização e espessura de dentina remanescente associada aos instrumentos ProTaper Next com e sem glide path. J Endod 2014;40:2053–6.
- Arias A, Singh R, Peters OA. Diferenças no desempenho torsional de sistemas rotatórios de uso único e múltiplo para preparação de glide path. Odontology 2016;104:192–8.
- Grande NM, Ahmed HM, Cohen S, et al. Avaliação atual da reciprocidade na preparação endodôntica: uma revisão abrangente—parte I: perspectivas históricas e aplicações atuais. J Endod 2015;41:1778–83.
- Plotino G, Ahmed HM, Grande NM, et al. Avaliação atual da reciprocidade na preparação endodôntica: uma revisão abrangente—parte II: propriedades e eficácia. J Endod 2015;41:1939–50.
- Keskin C, _Inan U, Demiral M, Kelesx A. Resistência à fadiga cíclica dos instrumentos de glide path R-Pilot, WaveOne Gold Glider e ProGlider. Clin Oral Invest 2018;22:3007–12.
- Özyürek T, Uslu G, Gündoğar M, et al. Comparação da resistência à fadiga cíclica e propriedades de flexão de dois arquivos de glide path de níquel-titânio reciprocantes. Int Endod J 2018;51:1047–52.
- Topçuoğlu HS, Topçuoğlu G, Kafdağ Ö, Arslan H. Resistência à fadiga cíclica de novos arquivos de glide path reciprocantes em canais curvados de 45 e 60 graus. Int Endod J 2018;51:1053–8.
- Yılmaz K, Uslu G, Gündoğar M, et al. Resistências à fadiga cíclica de vários instrumentos rotatórios e reciprocantes de glide path de níquel-titânio à temperatura corporal. Int Endod J 2018;51:924–30.
- Santos CB, Simões-Carvalho M, Perez R, et al. Resistência à fadiga torsional dos sistemas reciprocantes de glide path R-Pilot e WaveOne Gold Glider NiTi. Int Endod J 2019;52:874–9.
- Sung SY, Ha JH, Kwak SW, et al. Resistências à fadiga torsional e cíclica dos instrumentos de preparação de glide path: G-file e PathFile. Scanning 2014;36:500–6.
- Gambarini G, Plotino G, Sannino GP, et al. Fadiga cíclica de instrumentos para glide path endodôntico. Odontology 2015;103:56–60.
- Martins JNR, Marques D, Mata A, Carame^s J. Eficácia clínica dos localizadores de ápice eletrônicos: revisão sistemática. J Endod 2014;40:759–77.
- Tsesis I, Blazer T, Ben-Izhack G, et al. A precisão dos localizadores de ápice eletrônicos na determinação do comprimento de trabalho: uma revisão sistemática e meta-análise da literatura. J Endod 2015;41:1818–23.
- Stöber EA, Duran-Sindreu F, Mercadé M, et al. Uma avaliação do Root ZX e iPex localizadores de ápice: um estudo in vivo. J Endod 2011;37:608–10.