
Diagnóstico funcional do SNC. Erros e suas soluções
Tradução automática
O artigo original está escrito em RU language (link para lê-lo) .
Sempre tivemos um interesse especial pelo trabalho com parâmetros individuais de articulação da mandíbula inferior. Se pensarmos, o que representam as trajetórias de movimento da mandíbula inferior? Elas são o resultado do funcionamento não apenas das articulações temporomandibulares (cabeças da mandíbula e meniscos), mas também do sistema muscular, ligamentos e arcadas dentárias.
Sobre o diagnóstico de distúrbios internos das articulações temporomandibulares com a ajuda de RM no webinar Algoritmos de diagnóstico por RM das articulações temporomandibulares.
Ao realizar tratamento ortodôntico, ortopédico e terapêutico, o médico altera e cria novos parâmetros para a articulação da mandíbula inferior ou tenta preservar os antigos. O tempo mostrará o quão funcionais serão as novas condições para o funcionamento do complexo anatômico descrito acima. Neste artigo, gostaríamos de falar sobre as principais etapas que são uma parte integral do diagnóstico funcional inicial das articulações temporomandibulares, e sobre o equipamento necessário para o diagnóstico.
Condicionalmente, o trabalho de um médico com o uso de equipamento adicional pode ser dividido em trabalho em espaços real e virtual. O critério único para um resultado bem-sucedido em ambos os formatos é a correta utilização do equipamento, o entendimento de suas capacidades técnicas e a precisão de sua programação.

Etapa I: transferência da posição do maxilar superior/inferior para o articulador usando arcos faciais anatômicos médios, problemas potenciais e suas soluções
Os arcos faciais anatômicos médios e anatômicos são usados para transferir o modelo de gesso do maxilar superior/inferior para o articulador. A precisão com que o arco facial é posicionado na cabeça do paciente afeta o diagnóstico subsequente e o resultado do tratamento. Existem dois tipos de arcos faciais anatômicos médios: aqueles que se orientam na cabeça do paciente com base em marcos cutâneos relativos ao plano de Camper ou de Frankfurt (figura 1).
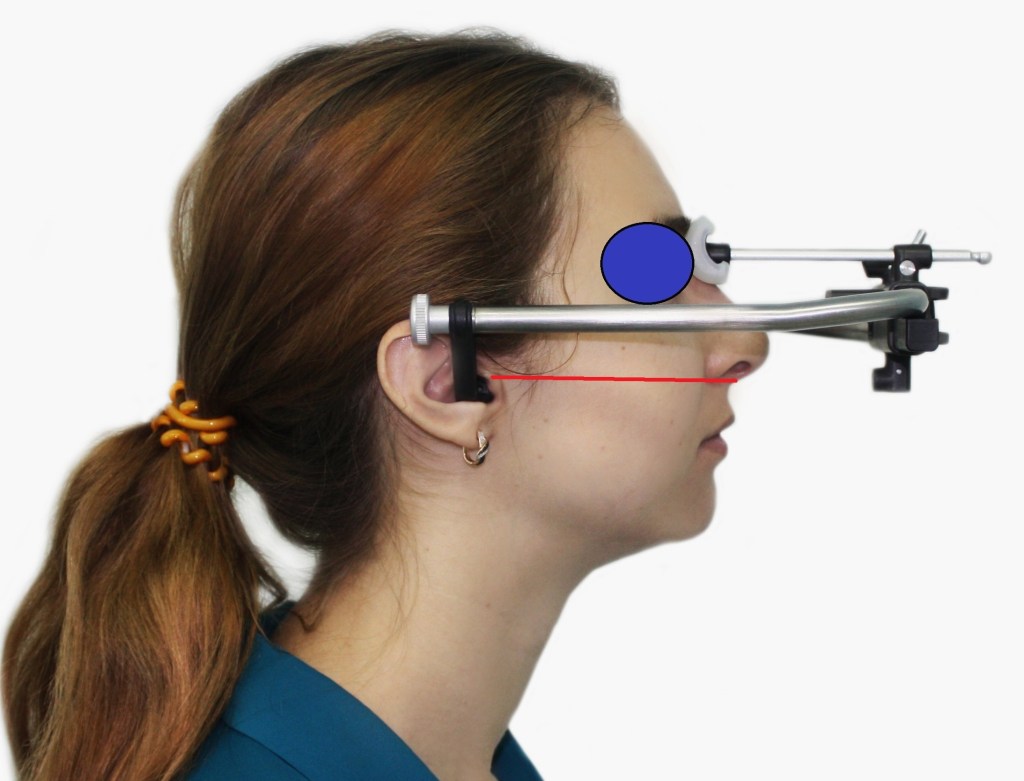
Figura 1. Localização do arco facial Arcus (Kavo).
Nem em todos os casos clínicos os marcos cutâneos coincidem com os ósseos, o que pode levar a erros na modelagem em gesso. O princípio de trabalho com tal arco é a obrigatória manutenção da paralelidade entre o arco facial posicionado na cabeça do paciente e o plano de Camper, formado pelos marcos cutâneos.
O que fazer se os marcos cutâneos não coincidem com os ósseos?
Realizar um exame radiológico da cabeça com pontos cutâneos radiopacos na referida superfície para uma análise mais detalhada. Clinicamente, essa técnica torna-se complexa, e nem todas as clínicas podem realizar tal exame radiológico. Se esse parâmetro for negligenciado, isso pode levar a uma alteração na inclinação do modelo no plano sagital (figura 2).

Figura 2. Rotação do modelo na/na projeção sagital no sentido horário ou anti-horário.
O que fazer se o plano de Camper não for paralelo ao protético?
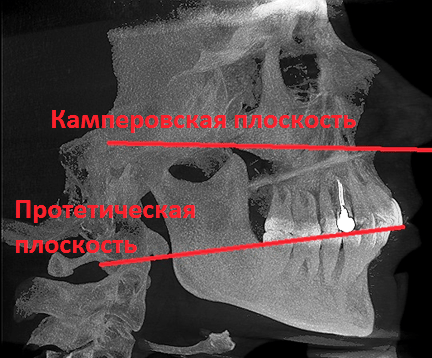
Figura 3. Tomografia computadorizada da cabeça. Análise da orientação dos planos.
E por que os planos devem ser paralelos (figura 3)? Se no articulador o modelo na/na estiver elevado na área dos incisivos na projeção sagital, mas ao mesmo tempo a arco facial estiver orientado corretamente em relação aos pontos de referência ósseos do plano de Camper, isso não será considerado um erro.
Erros que ocorrem ao usar arcos faciais anatômicos médios podem ocorrer na projeção sagital (inclinação do modelo para frente ou para trás), no plano frontal (inclinação do modelo para a direita ou para a esquerda), no plano horizontal (rotação do modelo, figura 4).
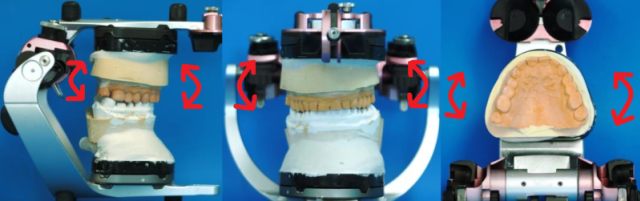
Figura 4. Possíveis deslocamentos do modelo no articulador.
Um dos erros mais graves é a incapacidade de controlar a distância do modelo até as cabeças articulares (figura 5).

Figura 5. Montagem do modelo no articulador usando um arco facial. Falta de controle da relação entre o modelo e os mecanismos articulares do articulador.
Este erro está relacionado ao fato de que na forquilha oclusal com registrador não há um ponto de referência para os incisivos superiores, portanto, a distância do modelo até as articulações não é fixada. Sabe-se que para o funcionamento normal dos modelos de gesso no articulador, considerando os parâmetros médios, os dados do triângulo de Bonwill (distância dos incisivos inferiores até os mecanismos articulares do articulador) devem ser levados em conta. No entanto, como o uso do arco facial implica na transferência do modelo superior, é necessário, em primeiro lugar, respeitar a distância individual dos incisivos superiores até os mecanismos articulares.
Assim, ao usar arcos faciais médio-anatômicos, existem imprecisões que podem ou não ser corrigidas. Isso está relacionado às falhas na estrutura dos próprios arcos.
Solução de problemas que surgem ao usar arcos faciais médio-anatômicos
Para resolver problemas que surgem ao usar arcos faciais médio-anatômicos, desenvolvemos uma técnica para transferir o modelo superior para o articulador e equipamento adicional - um marcador central e um suporte (figura 6).
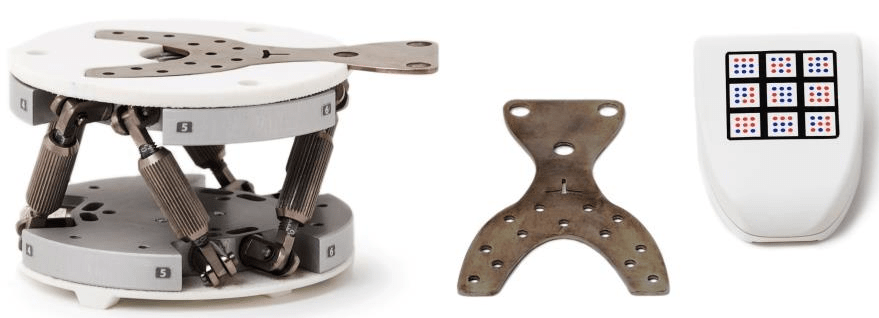
Figura 6. Suporte para gesso e marcador central (Prosystom).
O marcador central consiste em um garfo e um controlador. Para controlar a posição do modelo no marcador, há uma marcação para os cortadores. Ao usar o marcador central, abandonamos quaisquer referências de superfície para minimizar erros (figura 7).

Figura 7. Localização do marcador central durante o registro da posição da plano protético.
Após determinar a posição individual do plano protético, o controlador fornece dados para ajustar o suporte de acordo com os parâmetros individuais (figura 8).
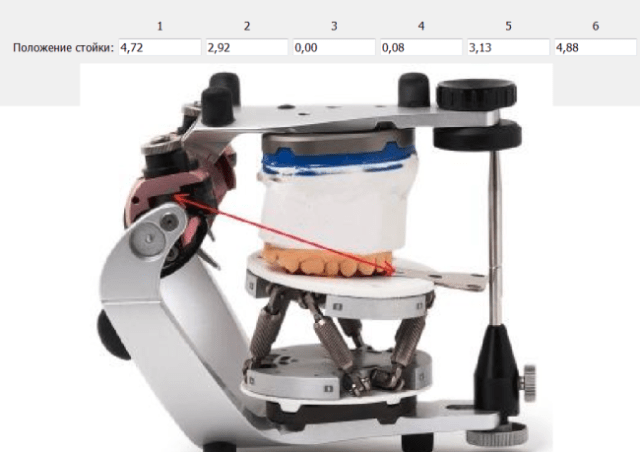
Figura 8. Gessagem do modelo em/para com o uso do suporte no articulador Protar.
Para levar em conta todos os parâmetros individuais durante a gessagem, usamos um módulo adicional de CT (figura 9).
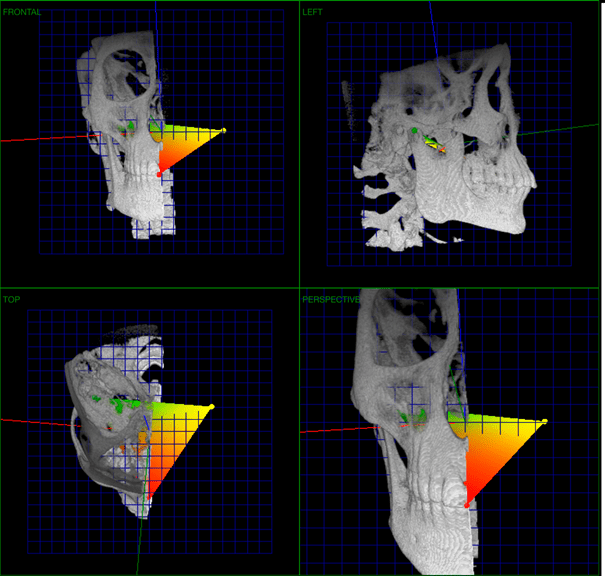
Figura 9. Módulo CT para gessagem (Prosystom).
Este módulo permite medir a distância individual dos incisivos da mandíbula superior até as cabeças articulares para posterior transferência para o articulador. Este método utiliza 3 pontos de referência: o ponto interincisivo na área da borda cortante dos dentes centrais superiores e pontos na área das cabeças articulares. Nota: é imprudente estabelecer o ponto de referência do eixo articulado usando apenas CT, isso é ditado por diferenças significativas na estrutura das cabeças articulares de uma pessoa e do articulador (figura 10).
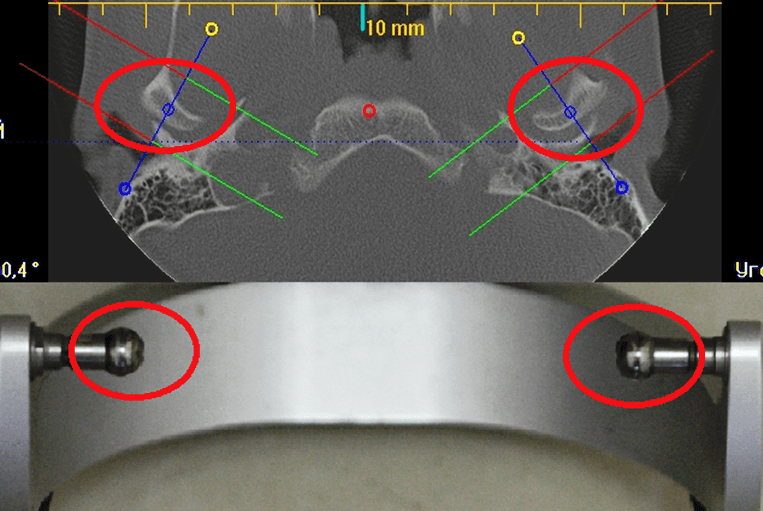
Figura 10. Análise comparativa da estrutura anatômica das cabeças articulares de uma pessoa e das cabeças articulares da armação inferior do articulador.
Portanto, colocamos o ponto na área das articulações no topo das articulações. A definição do ponto nos mecanismos articulares do articulador também não apresenta dificuldades. Depois que os modelos são corretamente gessados no articulador levando em conta os parâmetros individuais, podemos proceder à sua configuração.
II fase: Programação do articulador de acordo com parâmetros individuais, uso de sistemas eletrônicos de registro de articulação n/ч, erros que ocorrem ao usar axiógrafos eletrônicos
A segunda parte do artigo é dedicada à programação de articuladores: abordaremos alguns problemas não resolvidos no uso de axiógrafos eletrônicos, pois esses sistemas são os mais precisos. Ainda permanece a questão relacionada ao custo elevado dos axiógrafos eletrônicos. Esse equipamento é secundário no trabalho e é necessário apenas para registrar as trajetórias de movimento n/ч e seus valores digitais. Os sistemas eletrônicos de registro estão no mercado há muito tempo, mas até agora não são particularmente populares. Por quê? Preço alto, falta de informações acessíveis para os médicos, erros ao usá-los em casos clínicos complexos, alguns dispositivos têm uma estrutura bastante complexa.
Os sistemas eletrônicos de registro, quando usados corretamente, são o único equipamento que permite:
- registrar quaisquer trajetórias de movimento n/ч;
- obter dados individuais para programação de articuladores;
- obter uma representação tridimensional da articulação n/ч;
- trabalhar em um espaço virtual com parâmetros individuais;
- obter dados para análise da oclusão dinâmica usando modelos virtuais;
- o uso desses dispositivos permite o monitoramento dinâmico de pacientes durante tratamentos prolongados.
Articuladores mecânicos, eletrônicos e virtuais são o principal equipamento nesta lista, pois são usados na fabricação de estruturas. E os axiógrafos são equipamentos auxiliares, necessários para ajustar os articuladores.
Os sistemas eletrônicos mais comuns são os ultrassônicos. Esses sistemas têm suas desvantagens.
Estrutura da forquilha paraoclusal para fixação do sensor ultrassônico (figura 11).
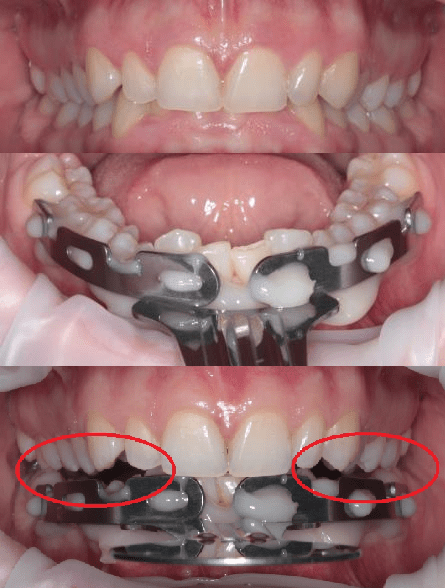
Figura 11. Posicionamento do garfo paraoclusal na arcada dentária inferior.
Uma profunda sobreposição incisiva serve como uma contraindicação relativa para a realização de um registro preciso da articulação inferior. Além disso, com a baixa altura clínica da parte coronária dos dentes inferiores, e a patológica abrasão do grupo frontal de dentes inferiores, o garfo pode impedir o fechamento habitual das arcadas dentárias. Consideramos isso uma desvantagem significativa, especialmente no diagnóstico de pacientes com disfunções da ATM, pois isso leva à separação das arcadas dentárias: o contato permanece, principalmente, entre os incisivos superiores e o garfo paraoclusal, o que por sua vez pode levar a um deslocamento incontrolável da mandíbula.
Nesse caso, é possível registrar as trajetórias de movimento da mandíbula, mas será praticamente impossível determinar onde as articulações estavam no início das trajetórias (figura 12). A análise articulatória para obter dados digitais ao programar o articulador com parâmetros individuais será inútil, pois as trajetórias clássicas envolvendo as arcadas dentárias serão alteradas.
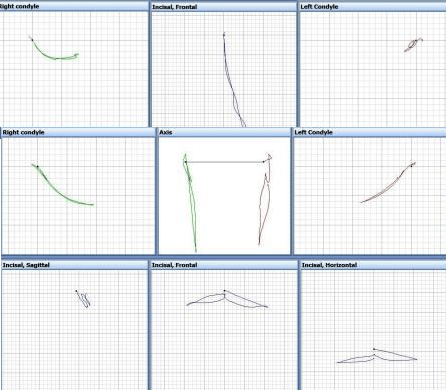
Figura 12. Trajetórias de movimentos n/ч: abertura-fechamento e laterotrusion.
Obtenção de diferentes trajetórias em um único paciente em vários estudos com um intervalo de tempo.
Primeiramente, o axiógrafo é fixado na cabeça do paciente, realiza-se a gravação da trajetória (por exemplo, abertura-fechamento da boca), e em seguida as trajetórias são exibidas na tela (figura 13).
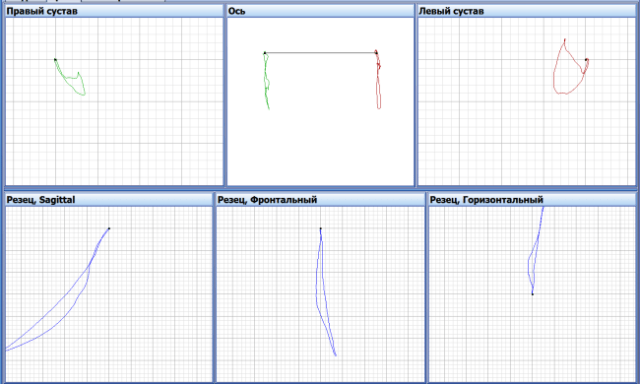
Figura 13. Trajetórias de abertura-fechamento da boca.
Posteriormente, o axiógrafo é completamente removido da cabeça do paciente e o mesmo estudo é realizado após 15 minutos. No entanto, no estudo subsequente, foram obtidas diferentes trajetórias (figura 14).
Quais dados desses estudos são corretos?
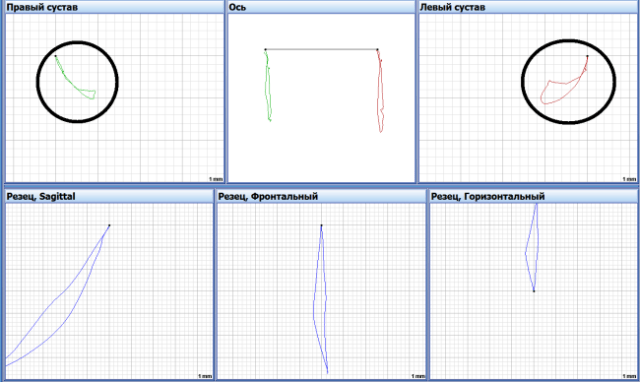
Figura 14. Trajetórias registradas após 15 min. Abertura e fechamento da boca.
Também foi realizada a registro de movimentos da mandíbula com consideração das guias dentárias para obter valores digitais dos ângulos e foram obtidos dados diferentes (figura 15).
Com base em quais dados programar o articulador?
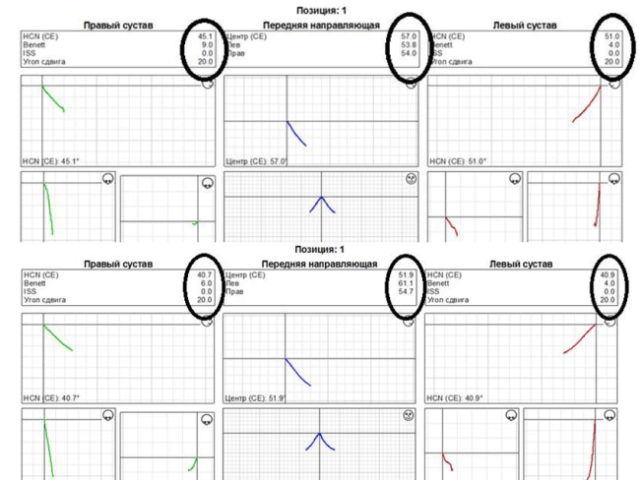
Figura 15. Diferentes dados para programação do articulador.
Os erros de dados ocorrem, principalmente, devido a diferenças na fixação do axiógrafo ultrassônico na cabeça do paciente nas medições descritas acima. Para resolver parcialmente esses problemas, é necessário manter o registro obtido com o garfo do arco dental em/para, e não alterar a posição do garfo paraoclusal durante os estudos com intervalos de tempo.
Solução de problemas que surgem na axiografia eletrônica
O principal resultado de nossas pesquisas foi a criação de um aparelho mais preciso e acessível para registrar movimentos do arco dental e a correção da própria metodologia de realização da axiografia eletrônica (fig. 16). Desenvolvemos o aparelho Dentograf (Prosystom).
Figura 16. Aparelho óptico para registro de articulação n/ч Dentograf (Prosystom).
Hoje, o Dentograf é o aparelho mais compacto e simples de manusear para o registro de trajetórias. É um aparelho óptico que utiliza apenas uma câmera em seu funcionamento.
Considerando os problemas descritos acima, que surgem com a fixação do sensor no n/ч, projetamos marcadores especiais que permitem realizar pesquisas praticamente com qualquer patologia das arcadas dentárias. Agora, a sobreposição profunda dos incisivos não é mais um obstáculo para as pesquisas (figura 17).
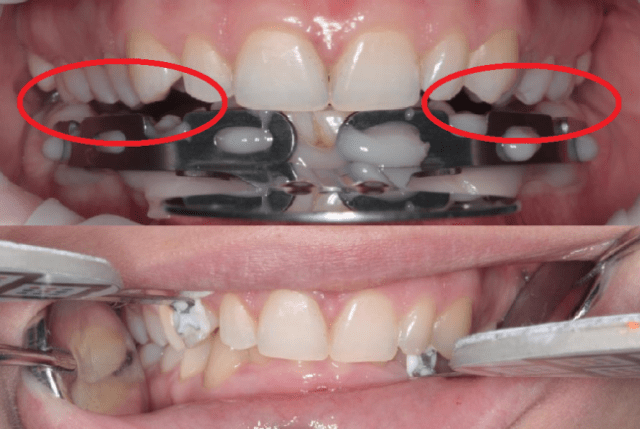
Figura 17. Localização da forquilha paraoclusal e dos marcadores laterais do aparelho Dentograf.
Um sensor central, que serve para determinar a posição individual do plano protético, dois laterais (figura 18). Um marcador lateral é fixado ao dente superior, outro ao dente inferior. Neste método, abandonamos completamente o uso de arcos faciais médio-anatômicos, aumentando significativamente a precisão do diagnóstico.

Figura 18. Conjunto de sensores do aparelho Dentograf.
Tornou-se possível realizar estudos em pacientes submetidos a tratamento ortodôntico com sistemas de brackets sem qualquer problema (figura 19).

Figura 19. Localização dos sensores laterais em pacientes com sistema de brackets nos dentes.
Todas as técnicas e equipamentos descritos anteriormente pela empresa Prosystom permitem realizar diagnósticos precisos e planejar tratamentos no espaço real.
III fase: Uso do articulador virtual na diagnóstico funcional primário (trabalho com modelos virtuais)
A próxima tarefa importante que tentamos resolver é a utilização de nossas capacidades no espaço virtual, ou seja, trabalhando com modelos virtuais.
O que há de novo com a chegada dos articuladores virtuais?
O articulador mecânico permite reproduzir 3 trajetórias: protrusão, laterotrusion para a direita e para a esquerda.
O articulador virtual permite reproduzir 3 trajetórias: protrusão, laterotrusion para a direita e para a esquerda.
Os articuladores virtuais são uma réplica completa dos mecânicos, mudando apenas o espaço – de real para virtual.
Quão necessários são os articuladores virtuais existentes, se suas capacidades funcionais são limitadas?
Por exemplo, por que não é possível reproduzir quaisquer trajetórias no espaço virtual e o que impede isso?
Isso é impedido pelos articuladores virtuais existentes no software atual, mais precisamente pela sua estrutura (figura 20).
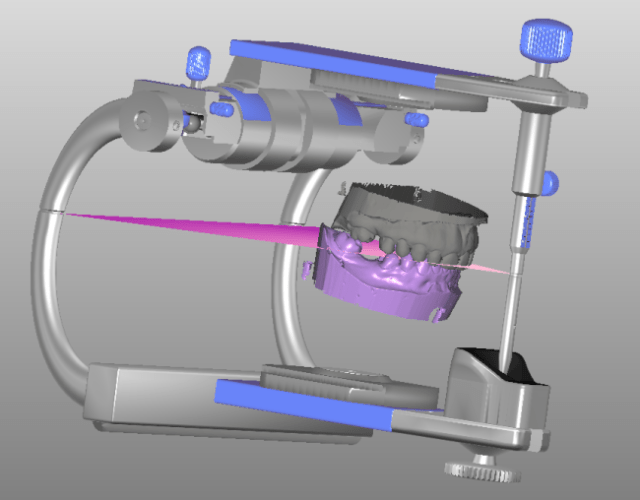
Figura 20. Articulador virtual.
Solução de problemas que surgem ao usar articuladores virtuais.
Para trabalhar no espaço virtual, considerando os parâmetros individuais do paciente, são necessários: tomografia computadorizada, modelos virtuais, trajetórias de movimento e orientação correta do modelo virtual em/para cima e em/para baixo.
Se tentarmos eliminar o articulador ao trabalhar no espaço virtual, novas possibilidades promissoras surgem:
- Relação individual entre modelos virtuais e articulações n/ч. Para isso, é necessário usar a TC da cabeça do paciente e modelos virtuais. Conectar a TC e os modelos hoje em dia não apresenta grandes dificuldades (figura 21).
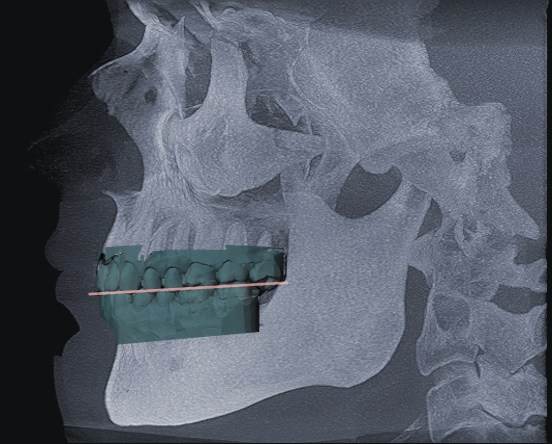
Figura 21. União da TC e modelos virtuais.
- Reprodução de quaisquer trajetórias de articulação n/ч com o uso de modelos virtuais (figura 22). Para isso, utilizamos o aparelho Dentograf.
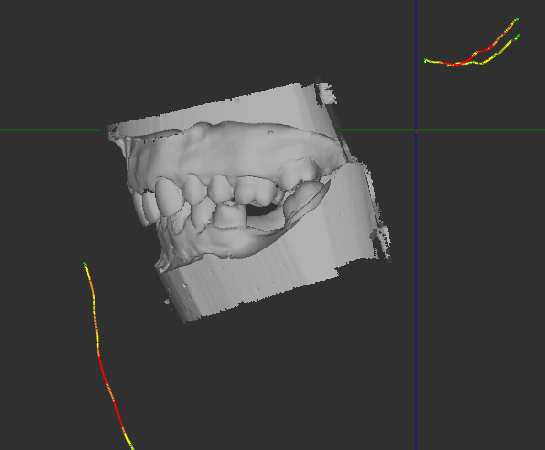
Figura 22. Trajetórias de movimento de n/ч e modelos virtuais.
- Orientação dos modelos no espaço virtual. A utilização de um marcador central permite posicionar o modelo de n/ч no espaço virtual da mesma forma que no paciente (figura 23).

Figura 23. Uso do marcador central para posicionar modelos no espaço virtual.
Realização de Diagnóstico Funcional de VNCHS (Conclusão)
Desenvolvemos uma técnica abrangente e novo equipamento para a realização do diagnóstico funcional primário de VNCHS. Este equipamento é universal para uso em espaços reais e virtuais com mínimas imprecisões.
Mais detalhes sobre o diagnóstico de lesões de VNCHS no webinar Exame Radiológico de VNCHS. Nível Avançado.
http://stomanet.ru/